Building an AI LEGO Sorting Machine: Raspberry Pi + OpenCV Tutorial
Last Updated: January 01, 2026
Supporting Free Content
When you purchase through our links, we earn a small commission at no extra cost to you. As an Amazon Associate and eBay Partner, this helps us keep bringing you expert LEGO® reviews and guides. Thank you for your support!
Breaking News
"I can make it look like a happy accident", my latest minifig oil painting
r/lego
•
1 day ago
Lego x Jujutsu Kaisen
r/lego
•
1 day ago
A triumphant tall ship made small – the Kalmar Nyckel sails again in LEGO
The Brothers Brick
•
2 days ago
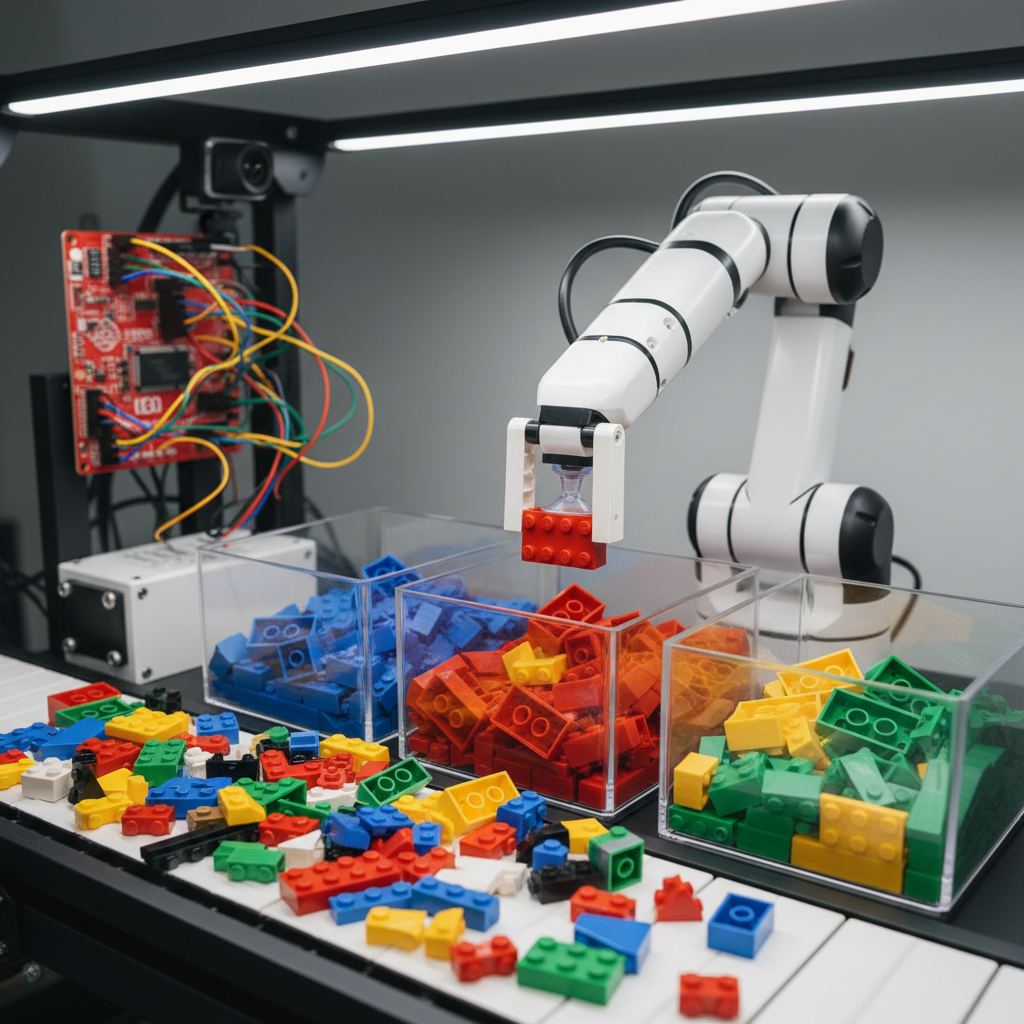
The automated LEGO sorting machine is the "holy grail" project for LEGO hobbyists. This guide covers building a complete vision-based sorter using Raspberry Pi, OpenCV for image processing, and optionally TensorFlow Lite for AI classification. Parts are identified by shape and color, then routed to the correct bin.
Table of Contents
- System Architecture
- Hardware Setup
- Vibratory Feeder
- Computer Vision Pipeline
- Classification Methods
- Sorting Mechanism
- Complete Code
System Architecture
┌─────────────┐ ┌─────────────┐ ┌─────────────┐
│ LEGO Bulk │ ──▶ │ Vibratory │ ──▶ │ Conveyor │
│ Hopper │ │ Feeder │ │ Belt │
└─────────────┘ └─────────────┘ └──────┬──────┘
│
▼
┌─────────────┐
│ Camera │
│ (Pi Cam) │
└──────┬──────┘
│
▼
┌─────────────┐
│ Raspberry │
│ Pi 4 │
│ OpenCV + │
│ TF Lite │
└──────┬──────┘
│
▼
┌─────────────┐
│ Build HAT │
│ + Servo │
└──────┬──────┘
│
┌────────────┬──────┴──────┬────────────┐
▼ ▼ ▼ ▼
┌────────┐ ┌────────┐ ┌────────┐ ┌────────┐
│ Bin 1 │ │ Bin 2 │ │ Bin 3 │ │ Bin 4 │
│ (Red) │ │ (Blue) │ │ (Bricks)│ │ (Plates)│
└────────┘ └────────┘ └────────┘ └────────┘
Hardware Setup
Bill of Materials
| Component | Purpose | ~Cost |
|---|---|---|
| Raspberry Pi 4 (4GB) | Main processor | $55 |
| Pi Camera Module 3 | Image capture | $25 |
| Build HAT | Motor control | $25 |
| LEGO Technic Motor (Large) | Conveyor drive | $15 |
| LEGO Technic Motor (Medium) | Feeder vibration | $12 |
| Servo motor (SG90) | Sorting gate | $3 |
| White LED strip | Consistent lighting | $10 |
| White acrylic sheet | Background | $5 |
Camera Positioning
Side View:
┌─────────┐
│ Camera │ ← 15-20cm above belt
└────┬────┘
│
▼
═══════════════[BRICK]═══════════════ ← White conveyor belt
│
─────────────────────┴───────────────── ← LED strip underneath (backlit)
Vibratory Feeder
The feeder separates clumped bricks and delivers them single-file to the conveyor.
How It Works
- Motor with eccentric weight creates vibration
- Angled ramp directs bricks toward conveyor
- Vibration separates stuck-together pieces
Building the Eccentric Weight
Motor Output ──┬── [Axle]
│
└── [Off-center Weight]
│
Rotation creates
vibration forceFeeder Control Code
from buildhat import Motor
feeder_motor = Motor('A')
def start_feeder(intensity=50):
"""Start vibratory feeder at given intensity (0-100)"""
feeder_motor.start(speed=intensity)
def stop_feeder():
feeder_motor.stop()
def pulse_feeder(on_time=0.5, off_time=0.5, cycles=10):
"""Pulse feeder to help separate stuck bricks"""
for _ in range(cycles):
feeder_motor.start(speed=80)
time.sleep(on_time)
feeder_motor.stop()
time.sleep(off_time)Computer Vision Pipeline
Step 1: Capture Image
import cv2
from picamera2 import Picamera2
# Initialize camera
picam2 = Picamera2()
config = picam2.create_still_configuration(main={"size": (640, 480)})
picam2.configure(config)
picam2.start()
def capture_frame():
"""Capture a frame from the camera"""
frame = picam2.capture_array()
return cv2.cvtColor(frame, cv2.COLOR_RGB2BGR)Step 2: Detect Part Contour
def detect_part(frame):
"""Detect LEGO part against white background"""
# Convert to grayscale
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# Threshold (white background = high values)
_, thresh = cv2.threshold(gray, 200, 255, cv2.THRESH_BINARY_INV)
# Find contours
contours, _ = cv2.findContours(thresh, cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)
if not contours:
return None
# Get largest contour (the LEGO part)
largest = max(contours, key=cv2.contourArea)
# Filter out noise (too small)
if cv2.contourArea(largest) < 500:
return None
return largestStep 3: Extract Features
def extract_features(frame, contour):
"""Extract shape and color features from detected part"""
features = {}
# Bounding box
x, y, w, h = cv2.boundingRect(contour)
roi = frame[y:y+h, x:x+w]
# === SHAPE FEATURES (Hu Moments) ===
moments = cv2.moments(contour)
hu_moments = cv2.HuMoments(moments).flatten()
features['hu_moments'] = hu_moments
# Aspect ratio
features['aspect_ratio'] = w / h if h > 0 else 0
# Solidity (area / convex hull area)
hull = cv2.convexHull(contour)
hull_area = cv2.contourArea(hull)
features['solidity'] = cv2.contourArea(contour) / hull_area if hull_area > 0 else 0
# === COLOR FEATURES (HSV Histogram) ===
hsv = cv2.cvtColor(roi, cv2.COLOR_BGR2HSV)
# Create mask from contour
mask = np.zeros(roi.shape[:2], dtype=np.uint8)
shifted_contour = contour - [x, y]
cv2.drawContours(mask, [shifted_contour], 0, 255, -1)
# Calculate histogram
hist = cv2.calcHist([hsv], [0, 1], mask, [30, 32], [0, 180, 0, 256])
hist = cv2.normalize(hist, hist).flatten()
features['color_hist'] = hist
# Dominant color
mean_color = cv2.mean(hsv, mask=mask)
features['dominant_hue'] = mean_color[0]
features['dominant_sat'] = mean_color[1]
return featuresClassification Methods
Method 1: Rule-Based (Simple)
def classify_by_color(features):
"""Simple color-based classification"""
hue = features['dominant_hue']
sat = features['dominant_sat']
if sat < 50:
return "white" if features['dominant_val'] > 200 else "black"
elif hue < 10 or hue > 170:
return "red"
elif 10 <= hue < 25:
return "orange"
elif 25 <= hue < 35:
return "yellow"
elif 35 <= hue < 85:
return "green"
elif 85 <= hue < 130:
return "blue"
else:
return "unknown"
def classify_by_shape(features):
"""Classify by aspect ratio and solidity"""
ar = features['aspect_ratio']
sol = features['solidity']
if 0.9 < ar < 1.1 and sol > 0.9:
return "1x1_brick"
elif 1.8 < ar < 2.2 and sol > 0.85:
return "2x1_brick"
elif ar > 3 and sol > 0.9:
return "plate"
else:
return "unknown"Method 2: Database Matching
import numpy as np
from scipy.spatial.distance import cosine
# Pre-computed feature database
KNOWN_PARTS = {
"3001_red": {"hu_moments": [...], "color_hist": [...]},
"3002_blue": {"hu_moments": [...], "color_hist": [...]},
# ... more parts
}
def match_to_database(features):
"""Find closest match in database"""
best_match = None
best_score = float('inf')
for part_id, known_features in KNOWN_PARTS.items():
# Compare Hu moments
hu_dist = np.linalg.norm(
features['hu_moments'] - known_features['hu_moments']
)
# Compare color histogram
color_dist = cosine(
features['color_hist'],
known_features['color_hist']
)
# Combined score
score = hu_dist * 0.4 + color_dist * 0.6
if score < best_score:
best_score = score
best_match = part_id
return best_match if best_score < 0.5 else "unknown"Method 3: TensorFlow Lite (AI)
import tflite_runtime.interpreter as tflite
import numpy as np
# Load model
interpreter = tflite.Interpreter(model_path="lego_classifier.tflite")
interpreter.allocate_tensors()
input_details = interpreter.get_input_details()
output_details = interpreter.get_output_details()
CLASSES = ["1x1_brick", "2x1_brick", "2x2_brick", "1x2_plate", ...]
def classify_with_ai(frame, contour):
"""Classify using TensorFlow Lite model"""
# Extract ROI
x, y, w, h = cv2.boundingRect(contour)
roi = frame[y:y+h, x:x+w]
# Resize to model input size
input_size = input_details[0]['shape'][1:3]
roi_resized = cv2.resize(roi, tuple(input_size))
# Normalize
input_data = roi_resized.astype(np.float32) / 255.0
input_data = np.expand_dims(input_data, axis=0)
# Run inference
interpreter.set_tensor(input_details[0]['index'], input_data)
interpreter.invoke()
# Get prediction
output = interpreter.get_tensor(output_details[0]['index'])
predicted_class = CLASSES[np.argmax(output)]
confidence = np.max(output)
return predicted_class, confidenceSorting Mechanism
Gate Sorter Design
Top View:
Conveyor Direction →
═══════════════════════════════════════════════
│ │
│ [GATE] │
│ / \ │
▼ / \ ▼
[Bin 1] [Bin 2]Servo Control
from buildhat import Motor
import RPi.GPIO as GPIO
# Using Build HAT motor for gate
gate_motor = Motor('C')
# Or using standard servo on GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(18, GPIO.OUT)
servo = GPIO.PWM(18, 50) # 50Hz
servo.start(0)
def set_gate_position(bin_number):
"""Move sorting gate to direct part to specified bin"""
positions = {
1: 0, # Straight
2: 45, # Slight left
3: 90, # Left
4: 135 # Far left
}
angle = positions.get(bin_number, 0)
# For Build HAT motor
gate_motor.run_to_position(angle)
# For servo: convert angle to duty cycle
# duty = 2.5 + (angle / 180) * 10
# servo.ChangeDutyCycle(duty)
def sort_part(part_class):
"""Determine bin and actuate gate"""
bin_mapping = {
"red": 1,
"blue": 2,
"brick": 3,
"plate": 4
}
bin_num = bin_mapping.get(part_class, 1)
set_gate_position(bin_num)
time.sleep(0.3) # Wait for part to passComplete Sorting Loop
#!/usr/bin/env python3
"""LEGO Sorting Machine - Main Control Loop"""
import cv2
import time
from picamera2 import Picamera2
from buildhat import Motor
# Initialize hardware
picam2 = Picamera2()
picam2.start()
conveyor = Motor('A')
feeder = Motor('B')
gate = Motor('C')
def main():
print("Starting LEGO Sorter...")
# Start conveyor and feeder
conveyor.start(speed=30)
feeder.start(speed=40)
try:
while True:
# Capture frame
frame = picam2.capture_array()
frame = cv2.cvtColor(frame, cv2.COLOR_RGB2BGR)
# Detect part
contour = detect_part(frame)
if contour is not None:
# Extract features
features = extract_features(frame, contour)
# Classify
part_class = classify_by_color(features)
print(f"Detected: {part_class}")
# Sort
sort_part(part_class)
time.sleep(0.1) # 10 FPS
except KeyboardInterrupt:
print("Stopping...")
finally:
conveyor.stop()
feeder.stop()
picam2.stop()
if __name__ == "__main__":
main()Optimization Tips
- Lighting: Consistent, diffuse lighting prevents shadows that confuse detection
- Background: Pure white background maximizes contrast
- Camera: Use global shutter camera for fast conveyors (no motion blur)
- Processing: Resize images before processing for speed
- Batching: For TensorFlow, batch multiple parts for GPU efficiency
Resources
Use Our Tools to Go Further
Get more insights about the sets mentioned in this article with our free LEGO tools